Moritz A. Zanger
Ph.D. Candidate at the TU Delft. Amateur Woodworker.

Me doing reinforcement learning in my workshop environment.
My name is Moritz A. Zanger. I am a fourth year Ph.D. student under the supervision of Prof. Matthijs T.J. Spaan and Dr. Wendelin Böhmer at the Sequential Decision Making group at the TU Delft (Netherlands). Prior to this, I received a Master of Science (w. distinction) in Mechanical Engineering from the Karlsruhe Institute of Technology (Germany).
My research focuses on efficient uncertainty estimation in deep reinforcement learning, a topic I consider crucially important in making AI more trustworthy and reliable. I am, however, interesed in most things related to reinforcement learning and deep learning. For example, I am excited about recent algorithms in unsupervised reinforcement learning and generative applications of RL, like generative flow networks.
news
| Jan 27, 2026 | Two papers-“Contextual Similarity Distillation” and “Universal Value-Function Uncertainties”-got accepted to ICLR 2026! Great news for my Ph.D. thesis! |
|---|---|
| Sep 20, 2025 | 2 Papers accepted to NeurIPS 2025! |
| May 13, 2025 | Universal Value Uncertainties is on Arxiv! |
| Sep 10, 2024 | Contextual Similarity Distillation is on Arxiv! |
| Sep 10, 2024 | One paper accepted at EWRL 2024 in Toulouse. |
| Apr 18, 2024 | One paper accepted at ICLR 2024 in Vienna! |
| Feb 14, 2024 | Our technical report on Epistemic AI passed the halftime review of EU Horizons. |
| Sep 03, 2023 | One paper accepted at EWRL 2023 in Brussels. |
| Oct 27, 2021 | Attended the ELLIS Doctoral Symposium in Tuebingen. |
| Sep 15, 2021 | One paper accepted at IROS 2021. |
| Jun 01, 2021 | Started a Ph.D. on Epistemic Uncertainty in RL with Matthijs Spaan at the TU Delft! |
publications
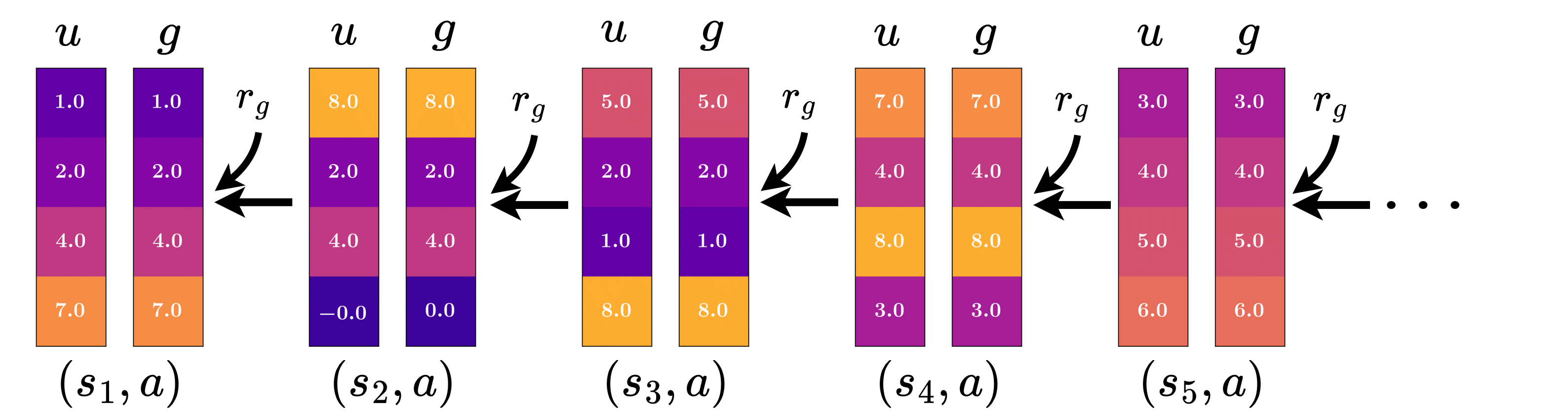
- Universal Value-Function Uncertainties2026
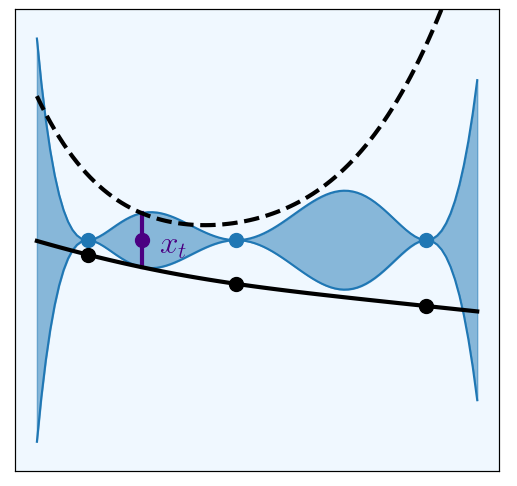
- Contextual Similarity Distillation: Ensemble Uncertainties with a Single ModelIn The Fourteenth International Conference on Learning Representations, 2026
- NeurIPS
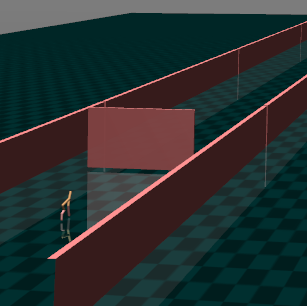
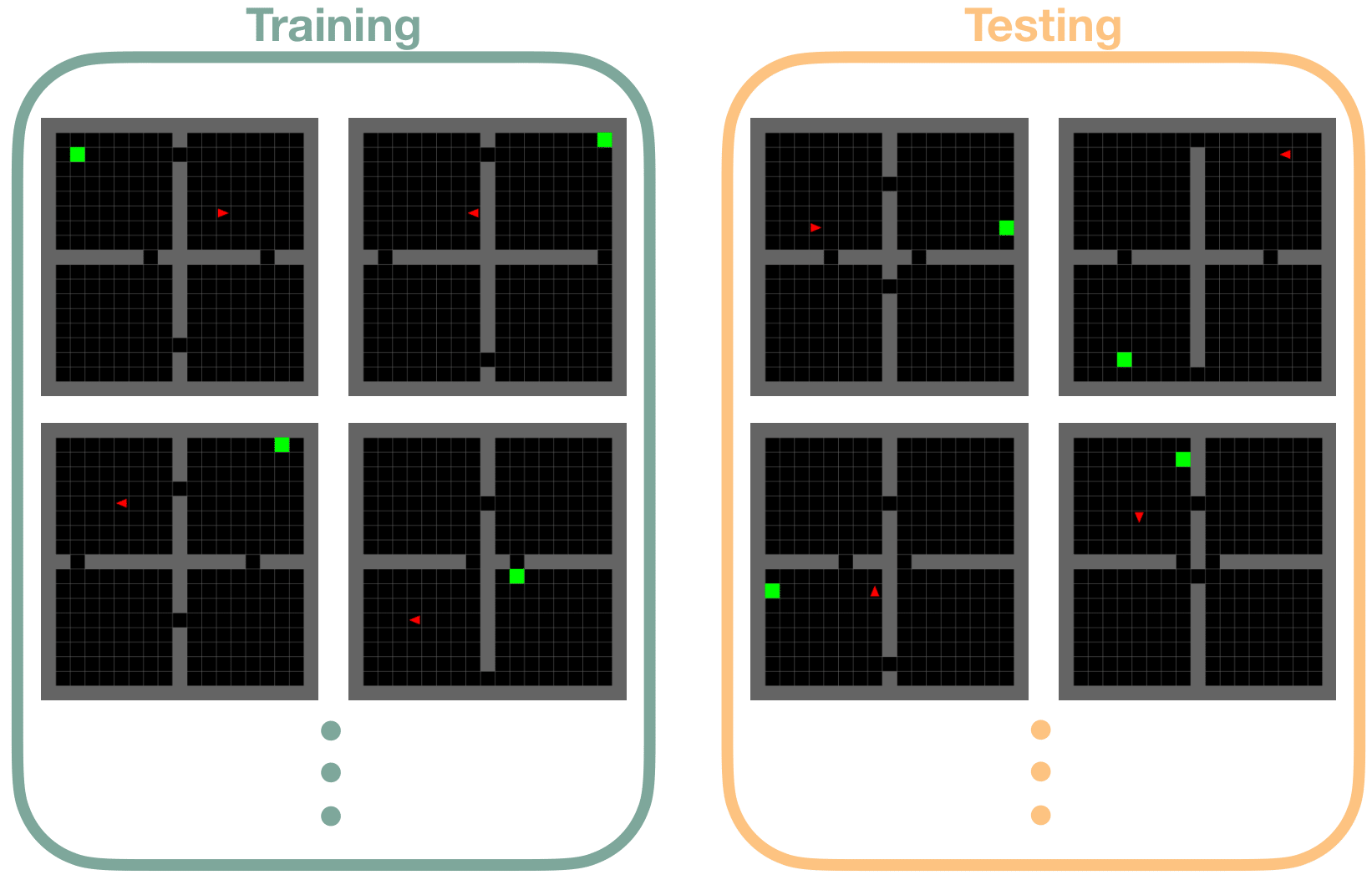 How Ensembles of Distilled Policies Improve Generalisation in Reinforcement LearningIn The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
How Ensembles of Distilled Policies Improve Generalisation in Reinforcement LearningIn The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025 - NeurIPS
 Value Improved Actor Critic AlgorithmsIn The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
Value Improved Actor Critic AlgorithmsIn The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025